openpilot + 外挂毫米波雷达:更精准的辅助驾驶体验
一先生 • 8 个月前 • 2348 次点击 •
作者:


近年來,自動駕駛技術發展迅速,而 openpilot 作為一款開源駕駛輔助系統,讓許多車主能夠享受類似 Tesla Autopilot 的體驗。不過,當前 openpilot 在某些情況下仍有局限,特別是「純視覺 ACC(Adaptive Cruise Control,自適應巡航系統)」的表現上仍有不足。這篇文章將探討 如果車輛的雷達不被 openpilot 支持,那麼外掛雷達是個不錯的選擇,並說明它如何提升駕駛體驗與安全性。
目前 openpilot 支援的雷達狀況
openpilot 目前可以使用部分車輛的原廠雷達來輔助 ACC,但仍有許多車廠的雷達尚未被支援。以下圖片顯示了 openpilot 目前支援與未支援的雷達車廠:
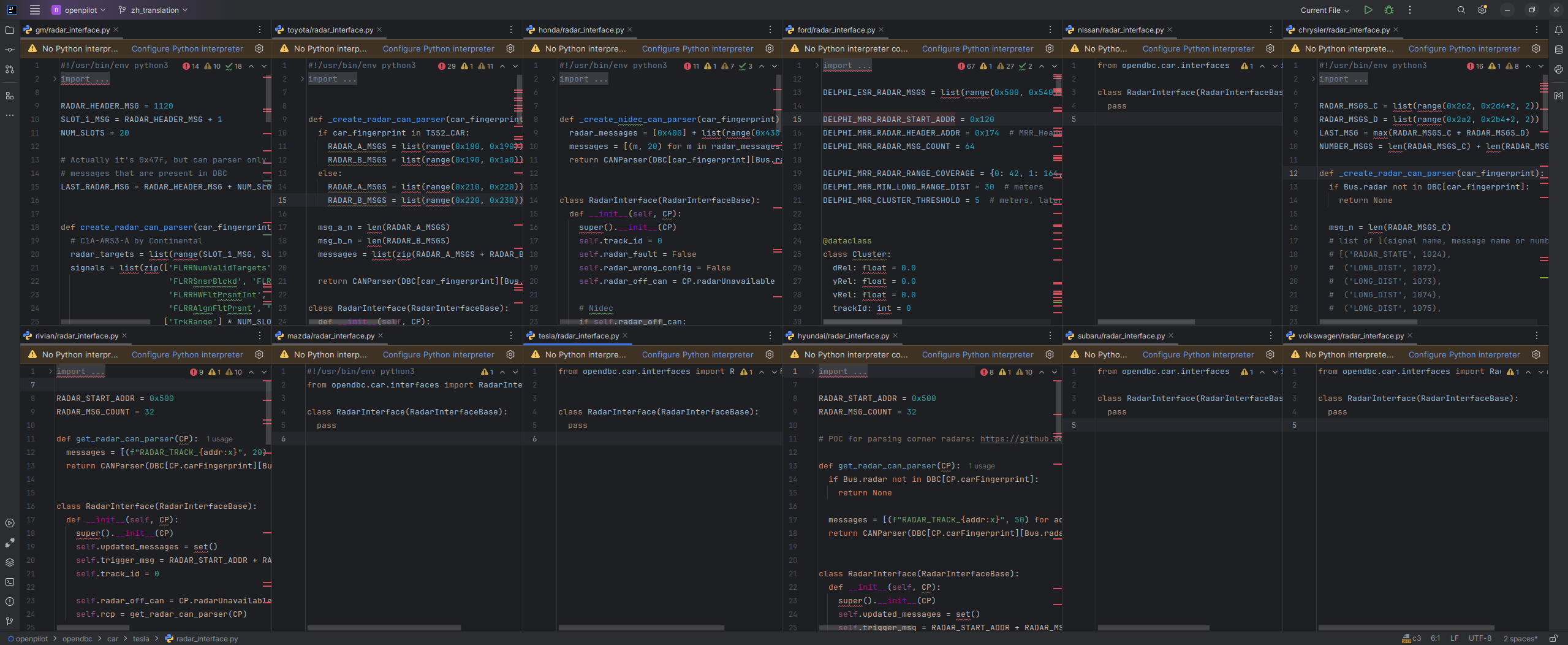
從圖中可以看出,每個車廠的雷達對應一個「Radar Interface」(雷達介面),用來解讀雷達數據。然而,部分車廠(如 Nissan、Volkswagen、Subaru 等)的介面仍然是空白的,表示 openpilot 尚未適配這些車型的雷達。這是因為這些車廠的雷達通訊協議尚未被破解,或者 openpilot 團隊尚未針對這些車款開發對應的解析器。
對於這些車輛來說,即使硬體上具備雷達,也無法被 openpilot 利用,這時候系統就只能依賴純視覺來進行 ACC 控制。
雷達 ACC 的優缺點
✅ 優點:
-
獨立於光線條件運作:即使在黑夜、強光、雨霧等惡劣天氣下,仍能穩定運行。
-
測距準確:雷達能夠準確測量前車距離與相對速度,避免誤判。
-
反應迅速:能夠即時偵測前車減速,並提供快速的剎車反應。
❌ 缺點:
-
無法判斷物件類型:雷達只能偵測「有東西」,但無法分辨是車、人、自行車或靜止物體。
-
可能受到靜止物體干擾:有時會誤判護欄、橋樑等靜止物體為前方障礙,導致不必要的剎車。
視覺 ACC 的優缺點
✅ 優點:
-
能夠識別物件類型:可以區分車輛、行人、自行車等,減少不必要的剎車或錯誤判斷。
-
更自然的駕駛風格:能夠模仿人類駕駛習慣,使跟車更加平順。
❌ 缺點:
-
受光線影響大:低光環境(如夜晚、逆光)或惡劣天氣(如大雨、大霧)可能影響準確度。
-
距離測量不精準:攝影機主要依靠圖像分析來估算距離與速度,與雷達相比誤差較大。
-
反應速度較慢:在突發情況下,視覺 ACC 的判斷與剎車動作可能不夠快,影響安全性。
openpilot 如何優化 ACC?
openpilot 的核心功能是取代原車 LKA Camera,提升車道保持能力,並且在部分車款上 使用原車雷達來提升跟車的能力。
其 前車判斷邏輯 如下:
-
視覺先判斷前方是否有物件(車、人、牆等),如果雷達回報相同位置有目標,則使用雷達的數據來計算距離與速度。
-
如果視覺判斷有物件但雷達沒有回報,則 openpilot 會完全依賴視覺來推算目標距離與速度。
-
如果視覺和雷達都沒有偵測到前方有車輛,則系統判定無前車,維持當前車速。
這種雷達 + 視覺的融合方式能夠提升 ACC 的可靠性,避免純雷達或純視覺各自的缺點。
如果 openpilot 不支援你的車輛雷達,該怎麼辦?
如果你的車輛雷達不被 openpilot 支援,目前有幾個選項可以考慮:
-
等待社群破解原廠雷達協議
-
openpilot 社群持續在研究各車廠的雷達數據,如果有新的進展,未來可能能夠支援更多車型。
-
-
改裝第三方毫米波雷達
-
目前已有部分開發者嘗試使用額外的毫米波雷達來提供距離資訊,有興趣可以參考:
-
-
使用純視覺 ACC
-
雖然純視覺 ACC 仍有部分限制,但 openpilot 團隊不斷優化視覺模型,使其更可靠。
-
如果未來某天,openpilot 的視覺模型已經足夠強大,可能就會像 Tesla 一樣棄用雷達。但目前來看,雷達 + 視覺仍是最佳方案,能讓 openpilot 的表現更穩定、跟車更自然、反應更快。
結論
如果你的車輛支援 openpilot,並且有雷達訊號可以使用,那麼它能夠:
✅ 提升 ACC 的跟車準確度
✅ 縮短緊急剎車反應時間
✅ 減少誤判,提升駕駛流暢度
所以如果你的車輛雷達尚未被破解,那麼當前 openpilot 只能依靠視覺進行 ACC,這可能會影響穩定性。在這種情況下,考慮加裝雷達,是提升 ACC 性能的不錯選擇!
我們盡量以最簡單易懂的方式說明,若有任何錯誤也麻煩各位指正。未經授權請勿任意轉發,轉發請註明出處,謝謝。